Structured Point Cloud (structured_pointcloud)
RIM-Nat supports the import of structured point clouds in the E57 format, enabling the management of large 3D scans captured by LiDAR devices or other scanning technologies. This format is particularly suitable for 3D point cloud data associated with 360-degree photos, commonly generated by terrestrial laser scanners.
Supported Formats for Structured Point Clouds
E57 Format
The E57 format is an open standard for 3D scanning data that allows the storage of point clouds, images, and metadata in a single file. It is widely used in applications requiring precise and detailed scans, particularly in fields like surveying, architecture, and engineering. Most point cloud processing software supports export in this format.
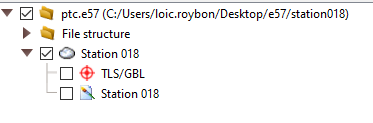
File Structure:
- A single E57 file for one scan station, including a 360-degree image.
- An E57 file for multiple scan stations, each station having its own 360-degree image.
Supported Image Types:
- Equirectangular: a panoramic image per scan station
- Skybox: six images forming a cube for each scan station

- Equirectangular: a panoramic image per scan station
File Constraints:
- The maximum size is determined by the user’s subscription level.
- File Names: as with other 3D formats, avoid spaces and special characters in file names.
For any further questions or assistance, please contact RIM-Nat technical support.